



مدتی است خودروها به سوی حذف نیاز به راننده پیش میروند و به نام خودروهای خودران از آنها یاد میشود، این خودروها با استفاده از حسگرهای پیشرفته و پردازندههای گوناگون بدون دخالت راننده مشغول پیمودن مسیر میشوند و هدف اصلی در طراحی این خودروها کاهش خطاهای انسانی و در نتیجه کاهش تصادفات و تلفات جادهای ناشی از آن است. با توجه به اینکه سال گذشته میلادی بیشترین اخبار دنیای خودرو معطوف به خودروهای خودران بوده است در این مقاله نگاهی به تکنولوژیهای بهکار گرفته شده در دنیای خودرو و آینده خودروهای خودران خواهیم انداخت.
اما از میان سیل بیانتهای فناوریهای موجود در خودروها کروز کنترل (Cruise control) اولین فناوری بود که خودروها را به سمت خودران شدن سوق میداد. کروز کنترل مدرن در سال 1948 توسط رالف تیتور (Ralph Teetor) معرفی و در سال 1958 در خودروهای شرکت ایمپریال (Imperial) به کار گرفته شد. این سیستم با استفاده از تعداد دورهای چرخش میل گاردان خودرو سرعت آن را محاسبه کرده و در مواقع لازم با موتوری جداگانه وضعیت دنده را در حالت مطلوب قرار میداد. بعدها با انجام تغییرات و رفع نواقص این سیستم راننده قادر بود تا سرعت مورد نظر را تعیین کند و با فشردن کلید کروز کنترل خودرو با رسیدن به آن سرعت به مسیر ادامه میداد و راننده تا زمان نیاز به افزایش سرعت یا کاهش آن نیازی به کنترل سرعت با پدال گاز نداشت. این سیستم در انواع خودروهای مختلف بهکار گرفته شد و در مسیرهای طولانی که اکثرا با سرعت ثابت طی میشدند کمی خستگی رانندگی را کاهش میداد.

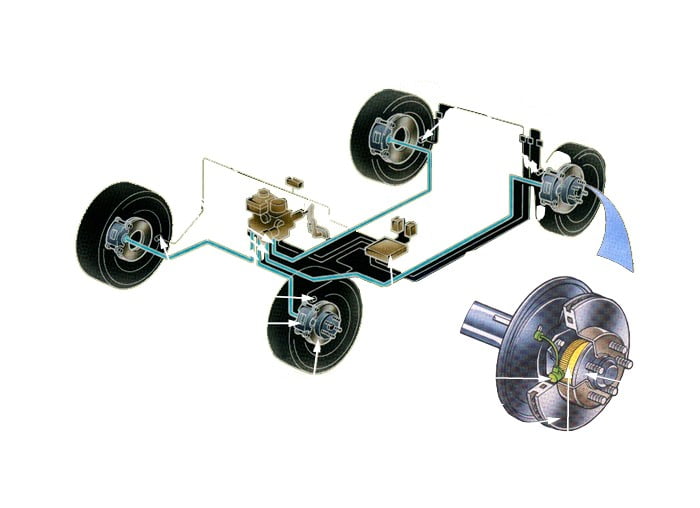
بعد از کنترل سرعت نوبت به ترمزهای خودروها رسید و در سال 1980 ترمزهای ضد قفل راه به دنیای خودرو گشودند، هدف از ارائه این نوع ترمزها کنترل بیشتر راننده روی هدایت خودرو در هنگام ترمزگیریهای شدید بود زیرا ترمزگیریهای شدید با ترمزهای معمولی باعث قفل شدن آنها و در نتیجه لیز خوردن خودرو و خارج شدن کنترل آن از دست راننده میشد و راننده برای جلوگیری از قفل شدن ترمزها مجبور بود تا چند بار ترمز را بفشارد اما ترمزهای ای بی اس این مشکل را رفع کرده و در سرعتهای بالا هنگام ترمزگیری مانع قفل شدن ترمز و در نتیجه لیز خوردن خودرو میشوند. با گذشت تقریبا 10 سال از عمر ترمزهای ای بی اس فناوری جدیدتری به کمک رانندگان در شرایط اضطراری مشابه آمد. این فناوری که کنترل پایداری (traction and stability control) نام داشت با کمک حسگرهایی که در چرخهای خودرو قرار داشت در مواقعی که امکان لیز خوردن وجود داشت میزان نیروی منتقل شده به چرخها را کنترل میکرد و با اعمال ترمز با کمک ترمزهای ای بی اس مانع لیز خوردن خودرو میشد.
اولین خودروی مدرن در سال 1885 توسط کارل فردریش بنز ساخته شد و از آن روز به سرعت با پیشرفتها و نوآوریهای گوناگون متوجه تغییرات زیادی بوده است. تغییرات ظاهری که بیشتر به زیبایی در کنار مقاومسازی بدنه مربوط میشوند و تغییرات بی پایان در پیشرانهها در جهت دسترسی به سرعتهای باور نکردنی اما تغییراتی نیز در جهت رفاه و آسایش سرنشینان به خودروها اضافه میشوند، از سیستم تهویه هوا داخل خودرو و شیشه بالابر برقی تا سیستمهای صوتی و تصویری که اخیرا با هم ادغام و به نام سیستمهای اطلاعات و سرگرمی در خودروها ارائه میشوند اما همانطور که از تعبیر نام خودرو انتظار میرفت این ساختههای دست بشر با تمامی تغییراتشان در طول تاریخ همواره بیشتر به سمت آسانتر کردن حمل و نقل برای افراد پیش میرفتند و در نوآوریهایی که به آنها افزوده میشد سعی بر این بود که در طول سفر نیز سرنشینان آسودهتر به خواستههای خود از خودرو دسترسی داشته باشند.

با ورود به قرن 21 میلادی سرعت ورود فناوریهای گوناگون به دنیای خودروها بیشتر شد و آنچه پیش از این تنها در فیلمهای تخیلی دیده میشد در خودروهای روزمره موجود و قابل استفاده بود. ورود سیستمهای صوتی و تصویری گوناگون از جمله پر طرفدارترین این فناوریها بود اما در این میان تلاش برای فراهم کردن ایمنی بیشتر در هنگام رانندگی همچنان ادامه داشت، حسگرها بیش از پیش وارد دنیای خودرو شده بودند و حال وظیفه اعلام هشدار در مواقع خطر را برعهده داشتند. این حسگرها در اطراف خودرو نصب شده بودند و با نزدیک شدن به اجسام راننده را با هشدارهای پیدرپی از فاصله با آن اجسام مطلع میساختند.کاربردیترین این حسگرها حسگر دندهعقب بود که به دلیل دید کم در هنگام حرکت با دنده عقب این حسگرها بسیار مفید واقع میشدند اما وجود حسگرها تاثیری بر خطر تصادف در سرعتهای بالا نداشت و در نتیجه سیستمهای ترمز با این حسگرها ادغام و هماهنگسازی شدند. خودرو در هنگام رانندگی و با تشخیص اجسام در فاصلههای متناسب با سرعت خودرو ابتدا اعلام هشدار و سپس اعمال ترمز میکند تا از بروز تصادف جلوگیری شود، این فناوری در شرایط بد جوی که دید کافی وجود ندارد و همچنین مواقعی که حواس راننده پرت شده باشد بسیار مثمرثمر واقع میشود. در نسخههای جدید این فناوری به هنگام تشخیص خطر این سیستم خود به خود کیسههای هوا را آماده رهاسازی میکند تا از صدمات وارده به سرنشینان تا حد ممکن کاسته شود.
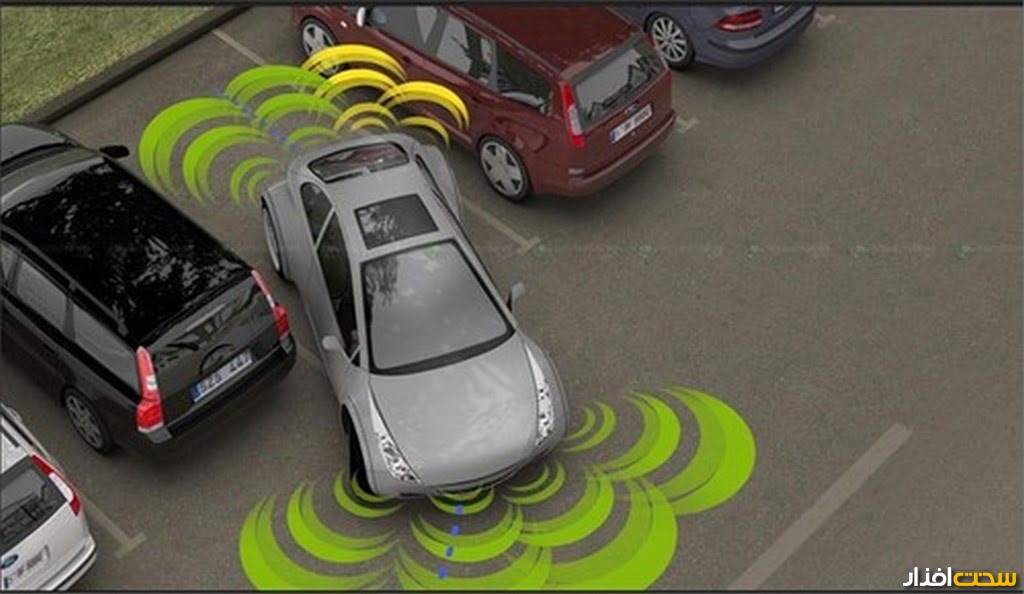
اما اولین اقدام که خودروها را به طور کامل از داشتن راننده بینیاز میکرد فناوری پارک خودکار بود. در نسخههای اولیه این سیستم ابتدا با کمک راننده فضای کافی برای پارک را تشخیص و به راننده اطلاع میداد سپس راننده با فعالسازی سیستم پارک خودکار کنترل فرمان را به خودرو میسپارد و خود تنها با فشردن آرام پدال گاز نیروی لازم برای پارک کردن را برای خودرو مهیا میکرد اما پیشرفت این فناوری به جایی رسید که اکنون حتی به حضور راننده در داخل خودرو هم نیازی نیست و تنها با استفاده از کنترل که معمولا در سوئیچ خودرو گنجانده شده است میتوان دستور پارک را انتخاب کرد تا خود خودرو این عملیات را انجام دهد. از سال 2009 میلادی شرکت گوگل پروژهای را با هدف ساخت خودروهایی بدون نیاز به راننده آغاز کرد. در ابتدا این شرکت با همکاری شرکتهای خودروسازی حسگرهای فراوانی را که به منظور آزمایش برای استفاده در خودروهای خودران در نظر گرفته بود روی تعدادی از خودروها نصب کرد و شروع به انجام آزمایشات متعدد با این نمونه از خودروها کرد. بعد از موفقیت تستهای این خودروها نمونهای از اولین خودروی خودران گوگل ساخته شد که گنجایش تنها دو سرنشین دارد و پدال و فرمان در آن موجود نیست. این خودروی کوچک با دریافت مجوز آزمایش در خیابانهای کالیفرنیای آمریکا اولین خودروی خودران بود که پا به خیابان گذاشت و تا کنون میلیونها کیلومتر مسافت را بدون نیاز به راننده پیموده است و همچنان مشغول طی کردن آزمایشهای گوناگون میباشد. این خودرو مسلح به تعداد بیشماری از حسگرهای مختلف است که در هر لحظه اجسام اطراف و حرکتهای آنها را تحلیل میکند و در عین حال شرایط خودرو برای مسیر پیشبینی شده را با دادههای بهدست آمده از محیط اطراف و حرکات اجسام پیرامون خودرو هماهنگسازی میکند.فناوری نقشه خوانی که از تلفنهای همراه راه به دنیای خودرو پیدا کرد نیز در خودرو خودران استفاده شده و اطلاعاتی نظیر سرعت مجاز در هر مسیر، میزان ترافیک در مسیرها و دیگر علائم و هشدارهای لازم نیز به طور پیشفرض در آنها گنجانده شده است. همه این فناوریها تنها آغاز راه خودروهای خودران هستند و برای ورود رسمی این مخلوقات دست بشر به زندگی روزمره هنوز مسیر زیادی باقی مانده است. استفاده از فناوری اشتراکگذاری ابری دادهها و ارتباط بین خودروهای خودران فناوریهایی هستند که در آینده نزدیک به آنها اضافه خواهند شد و مورد آزمایش قرار خواهند گرفت. با استفاده از این سیستم خودروها میتوانند اطلاعات مسیری را که میپیمایند با یکدیگر به اشتراک بگذارند و شرایط یا موانع موجود در مسیر را برای دیگر خودروهای خودران مشخص کنند.

مسلم است که همیشه از همه فناوریها بهرهبرداریهایی به گونههای مختلف انجام خواهد شد و خودروهای خودران نیز از این قاعده مستثنا نیستند، موسسه DARPA (Defense Advanced Research Projects Agency) از هم اکنون شروع به انجام تحقیقاتی روی نمونههای اولیه خودروهای خودران کرده است تا شرایط آنها را برای استفاده در شرایط جنگی بررسی کند، به عنوان مثال استفاده از خودروهای خودران برای انتقال مهمات در میدان جنگ تلفات انسانی را تا حد چشمگیری کاهش خواهد داد. در هر حال حضور خودروهای خودران در آینده انکار نشدنی است و با گذشت چند سال شاهد حضور اولین نمونه از خودروهای خودران در خیابانها خواهیم بود.
















اتفاقا اینا بهترن.
خیلی قابل اعتماد نیستند این خودروهای بدون سرنشین
همیشه با وجود میدان های مغناطیسی و مراکز و قطعاتی که امواج مضر ساتع میکنن با ایجاد اختلال در سیستم سنسور های اینجور وسایل و لوازم و ماشین های آینده باعث عدم پیشرفت تکنولوژی خواهند شد. یادمه یکی از دوستامون یه سیستم قوی صوتی داشت روی ماشینش که هر وقت از دوربین عقب ماشین میخواست استفاده کنه و همزمان سیستم روشن بود تصویر دوربین دارای نویز بسیار زیادی بود که به این نتیجه رسیدیم که سیستم صوتی رو خاموش کنیم
ظاهرشون جالب نیست.
قطعن آینده ماشین ها هم به تکنولوژی وابستس و اینو نمیشه انکارش کرد. در سریال Person of Interest یک مک لارنو از فاصله دور هک میکنه و کنترل چرخها و ترمزشو در اختیار میگیره. در مجموع رو به تکامله و ممکنه بعضی ها حس خوبی نداشته باشند به این قضیه اما خواه ناخواه شرکتها به این سمت میرن و فقط در کشور ماس که چیز عجیبیه این قضیه، چون در مملکت ما هنوز مردم فک میکنن دیزل برای ماشین سنگیناس و نمیدونن پرفروشترین آمار مربوط به سواریهای دیزل است.
واقعا ماشین های میکانیکی فوق العادس و لذت داره اما ماشین های DIGI اصلا خوب نیست و بشخصه خوشم نمی یاد
جالب بود:-bd:-bd:-bd
اصلا از ماشین های خودران خوشم نمیاد یه جورین حس خوبی بهشون ندارم:smiley8