


خودروهای خودران هنوز هم مستعد اشتباه در رانندگی هستند، چرا که آموزشهای مبتنی بر هوش مصنوعی برای بسیاری از شرایط در نظر گرفته شده است و “همه شرایط” را شامل نمیشود. مایکروسافت و موسسه فناوری ماساچوست (MIT) قصد دارند که با همکاری یکدیگر این شکاف را با توسعه مدلی که میتواند به گفته آنها “نقاط کور” مجازی را شناسایی کند، برطرف کنند.
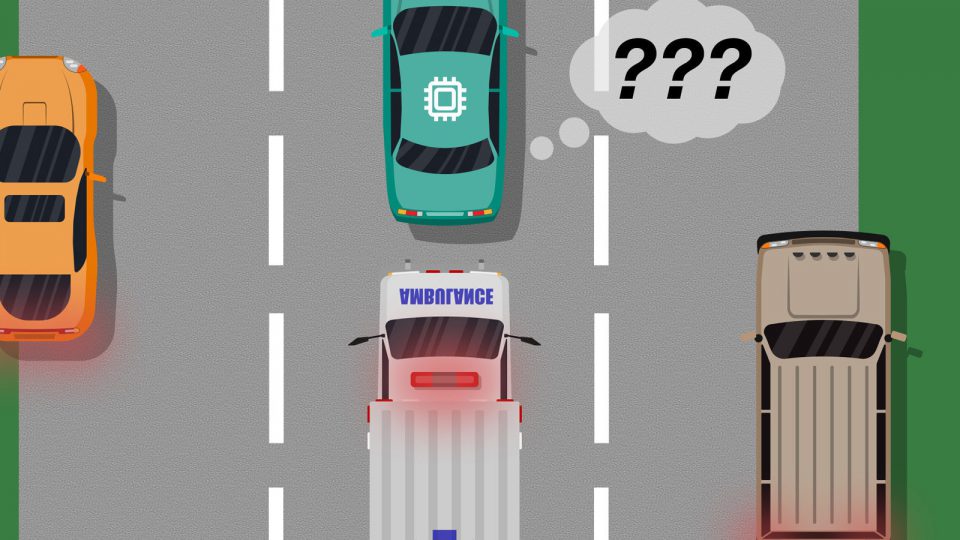
هدف مایکروسافت و MIT اینست که هوش مصنوعی با مقایسه رفتار خود و انسانها تفاوت واکنشها را تشخیص داده و عملکرد خود را بسته به میزان شباهتی که در نوع واکنش مشاهده کرده، تغییر دهد. یعنی اگر یک خودروی خودران نمیداند که در برخورد با آمبولانس چه رفتاری از خود نشان دهد، میتواند با مشاهده عملکرد انسانها در این شرایط، واکنش آنها را بیاموزد. در این مدل همچنین امکان آموزش در لحظه نیز وجود دارد، به این صورت که اگر هوش مصنوعی به عنوان مثال تصمیم اشتباهی مرتکب شد، راننده میتواند با به دست گرفتن کنترل خودرو، اشتباه هوش مصنوعی را به آن آموزش دهد.
محققان حتی روشی درنظر گرفتهاند که با استفاده از آن خودروهای خودران را از اینکه تمامی تصمیمات آنها امن و بینقص است، برحذر دارند. الگوریتم یادگیری ماشینی نه تنها واکنشهای قابل قبول و غیرقابل قبول را از هم متمایز کند، بلکه با استفاده از محاسبه احتمالات و شناسایی الگوها میتواند تشخیص دهد که آیا تصمیم آن کاملاً امن است یا احتمال بروز مشکل وجود خواهد داشت. حتی اگر عملی در 90 درصد مواقع درست باشد، همچنان مشکلی در آن میبیند که نیاز به رفع آن دارد.
این تکنولوژی هنوز برای تست در محیط واقعی آماده نیست و پژوهشگران تنها آن را در مدلهایی با بازیهای ویدئویی آزمایش کردهاند, جاییکه پارامترهای محدود و شرایط تقریباً ایدهالی فراهم است. مایکروسافت و MIT باید در آینده این فناوری را بر روی ماشینهای واقعی آزمایش کنند. اگر این آزمایش نتیجهبخش باشد تأثیر بسیار زیادی در تولید خودروهای خودران کاملاً قابل استفاده خواهد داشت. خودروهای خودران فعلی مشکلات زیادی در مواجه با شرایط مختلف مانند برف یا حتی مسیرهای پرسرعت که کوچکترین اشتباه میتواند منجر به تصادف شود، دارند. فناوری جدید میتواند تصمیمگیریهای آنها را سادهتر کند و امنیت بیشتری برای سرنشینان خودرو فراهم کنند.

















دیدگاهتان را بنویسید