


محققان موفق به ساخت رباتهای بسیار کوچکی شدهاند که میتوانند به صورت جمعی کار کنند و اشکال و ابزارهای جدیدی بسازند. این فناوری که از طبیعت الهام گرفته شده، با شناسایی و توسعه ویژگیهایی کلیدی که یک مجموعه رباتیک برای دستیابی به اهداف برنامهریزیشده خود نیاز دارد، به وجود آمده است. این ربات ها که از طبیعت تقلید میکنند و در یک چشمبههمزدن از مایع به جامد تبدیل میشوند!
محققانی از دانشگاه کالیفرنیا در سانتا باربارا (UCSB) مجموعهای «شبیه به ماده» از میکرو ربات های برنامهپذیر طراحی کردهاند که میتوانند مانند یک مایع عمل کنند یا به هم متصل شده و ساختارهای جامد جدیدی ایجاد کنند. این فناوری میتواند به ظهور شاخه جدیدی در علم رباتیک منجر شود.
تغییر شکل از مایع به جامد
دانشمندان UCSB تلاش کردند تا رباتهای سادهای طراحی کنند که بتوانند مانند یک کلونی مورچه یا سایر گروههای جمعی با هم کار کنند. این مطالعه که بهتازگی در مجله Science منتشر شده است، میکرو ربات هایی را توصیف میکند که میتوانند بسته به حالت چرخشی رباتها، از حالت «مایع گونه» به شکل «جامد تر» تغییر وضعیت دهند.
ایده این فناوری مستقیماً از مفاهیم علمی-تخیلی، مانند T-1000 از فیلم Terminator 2: Judgement Day گرفته شده است. محققان ادعا میکنند که این چشمانداز نظری را با مطالعه مورفوژنز جنینی (فرآیند زیستی که طی آن سلولها شکل خود را تغییر داده و به بافتهای مختلف بدن انسان تبدیل میشوند) به واقعیت تبدیل کردهاند.
پروفسور اوتگر کامپاس از UCSB در گفتگو با SciTechDaily بیان کرد: بافتهای جنینی زنده مانند یک ماده هوشمند نهایی رفتار میکنند. این سلولها میتوانند خودشان شکل بگیرند، خودشان را ترمیم کنند و حتی قدرت ماده خود را کنترل کنند. همچنین میتوانند به طور موقت نرم شده و بین حالتهای جامد و مایع جابجا شوند تا شکل نهایی جنین را توسعه دهند.
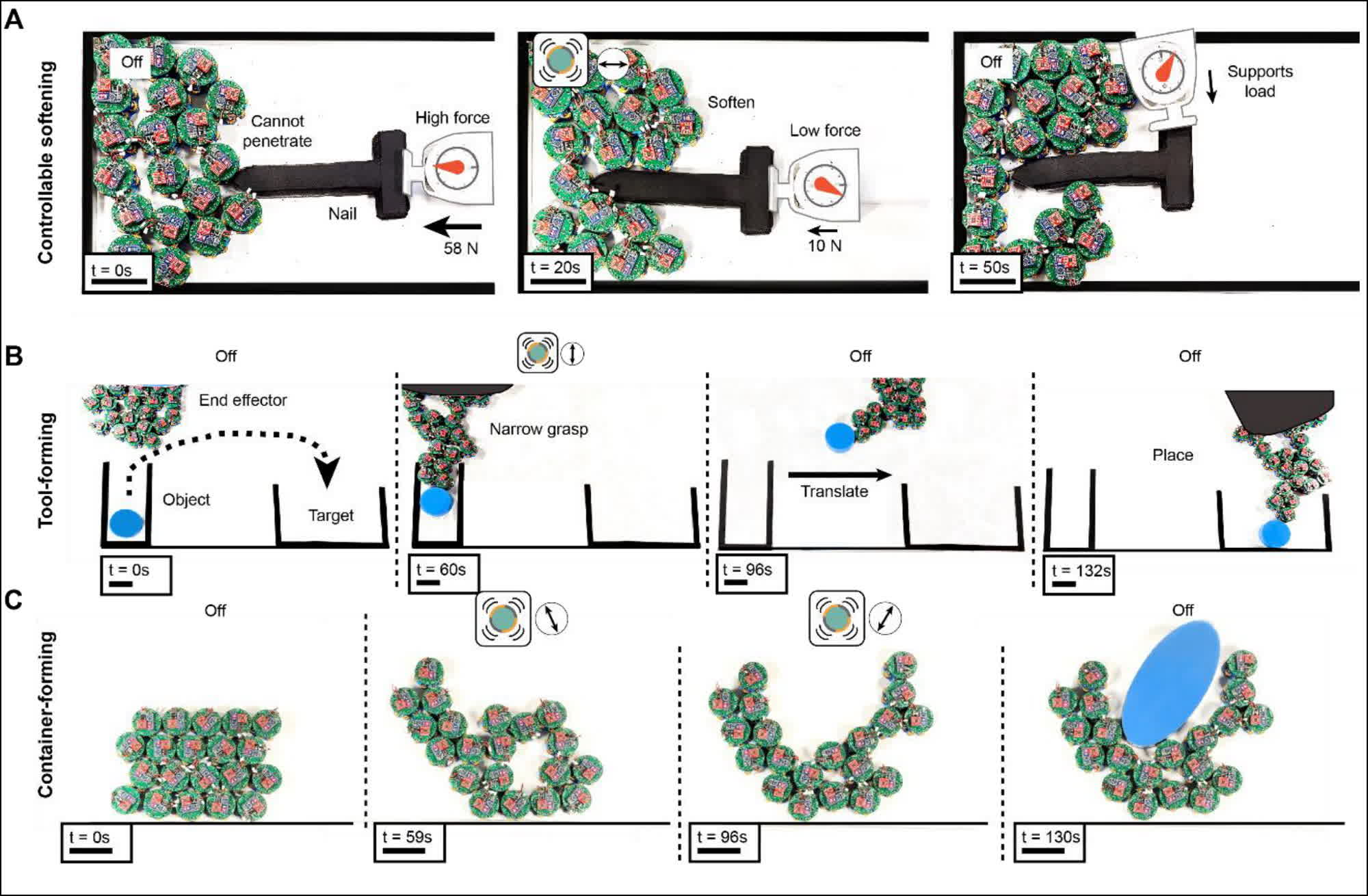
محققان UCSB سه فرآیند زیستی را شناسایی کردند که توانستند رباتهای جمعی خود را برای تقلید از آنها برنامهریزی کنند: نیروی بینواحدی، قطبیسازی و چسبندگی. این سه فرآیند به سلولها اجازه میدهند تا باهم حرکت کرده، حرکتهای خود را هماهنگ کنند و در حین توسعه به یک قسمت جامد ارگانیک، به یکدیگر بچسبند.
تیم تحقیقاتی معادلهای میکرورباتیکی این سه فرآیند زیستی را با استفاده از آهنربا و هشت چرخدنده موتوری که روی لایه بیرونی دایرهای هر ربات نصب شده است، توسعه دادند. برای آزمایش خود، محققان مجموعهای از 20 واحد میکرورباتیک نسبتاً بزرگ ایجاد کردند که میتوانستند به اشکال مختلف تبدیل شوند.
گام بعدی این تیم، کوچکترکردن این رباتها و افزایش تعداد واحدهای داخل مجموعه است. با استفاده از یادگیری ماشین، هزاران میکروربات میتوانند بهطور نظری به محققان اجازه دهند که مجموعهای را به هر شکل دلخواه با دقت بالا مونتاژ کنند.



















دیدگاهتان را بنویسید